|
Humanoid Platform
Many robot engineers long to build humanoid robots that resemble the form of humans, and it is also the most built robot that many researchers and developers using DYNAMIXEL actuators make.
Open source humanoid platform ROBOTIS OP, which opens all its CAD drawings, circuit diagrams, and source codes is not only used for research in kinematics, dynamics, gait, image recognition, and HRI, but also used as a platform in RoboCup, FIRA, and other artificial intelligence required robot competitions. The ROS system is applied to the latest ROBOTIS OP3 version which was released in 2017 to offer users a various and easy development environment.
 
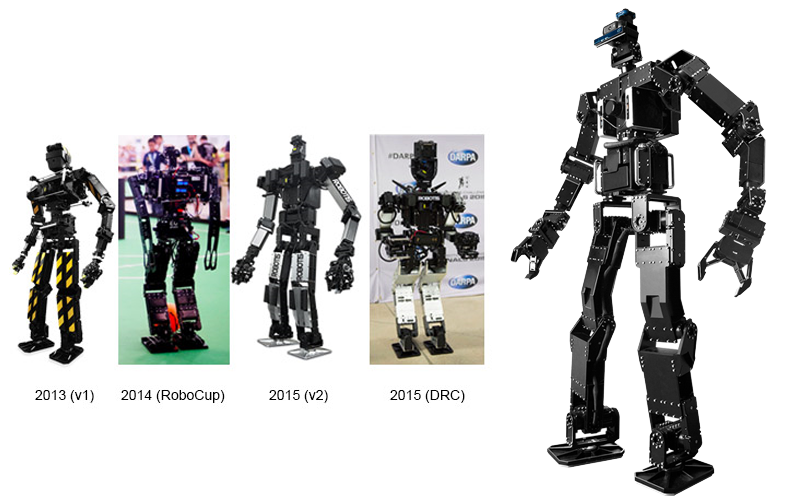
THORMANG was first presented at the 2015 DARPA Robotics Challenge, a disaster relief robot competition. It was developed based on our high performance actuator, the DYNAMIXEL Pro, and is the world’s first open source full sized humanoid platform that can be put into an actual field. It is highly recognized as a learning and research platform robot thanks to its open design and sources.
Our open-source based humanoid platforms have become a foundation stone in building up the DYNAMIXEL ecosystem and have become the benchmark for many robotics researchers.
|
902-0059-001 ROBOTIS OP2-FSR Set
|



