|
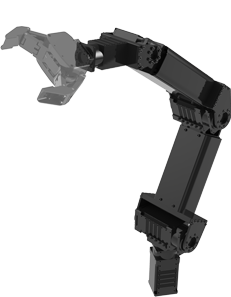
Multi-Purpose Affordable Manipulator
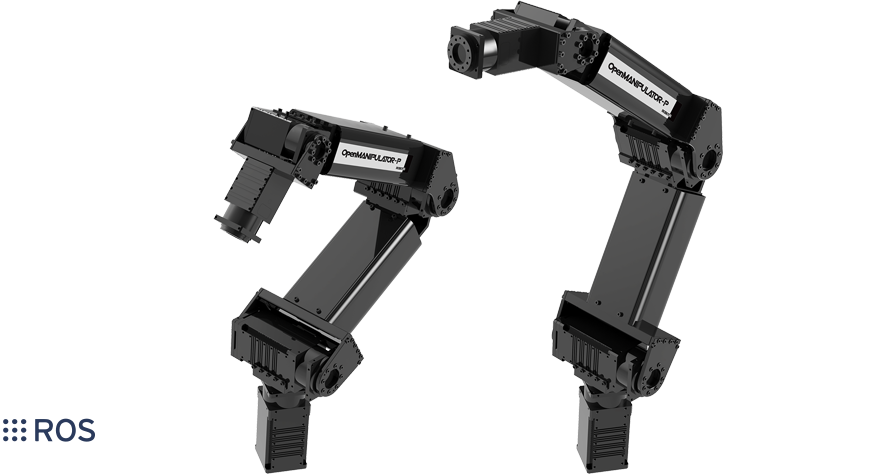
What is "Open Manipulator-PRO�
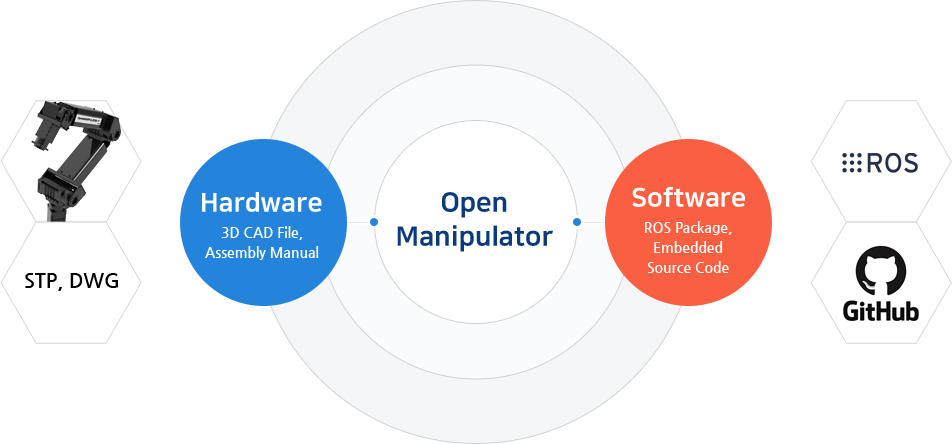
ROBOTIS provides open-source CAD, software, hardware design, and public resources for development of robotic manipulator arms.
Specifications
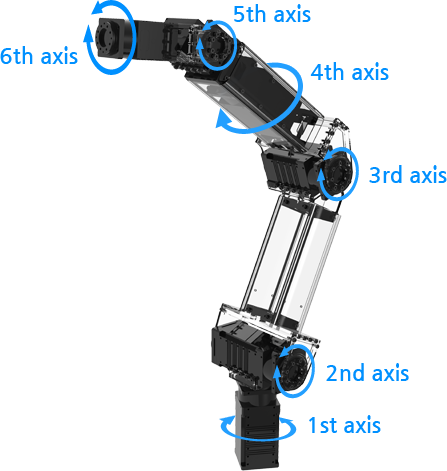
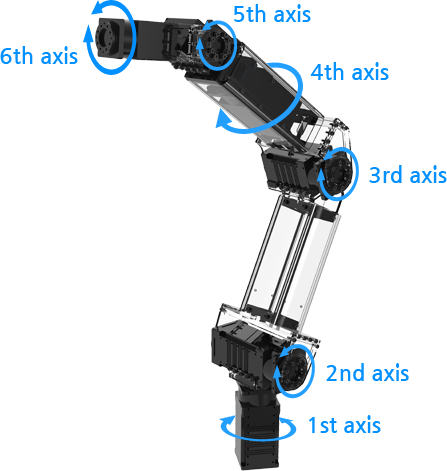
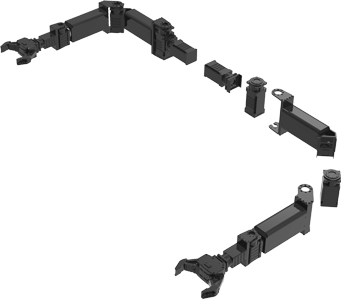
Actuator Arrangement & Mechanical Structure
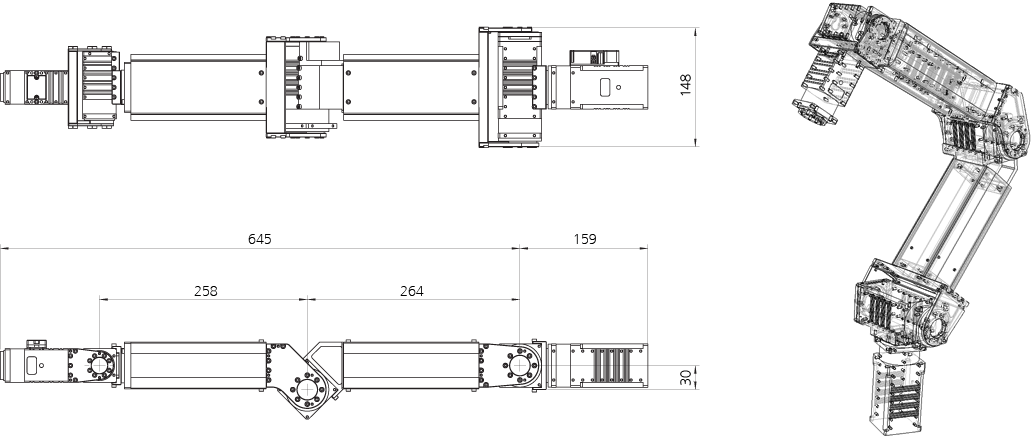
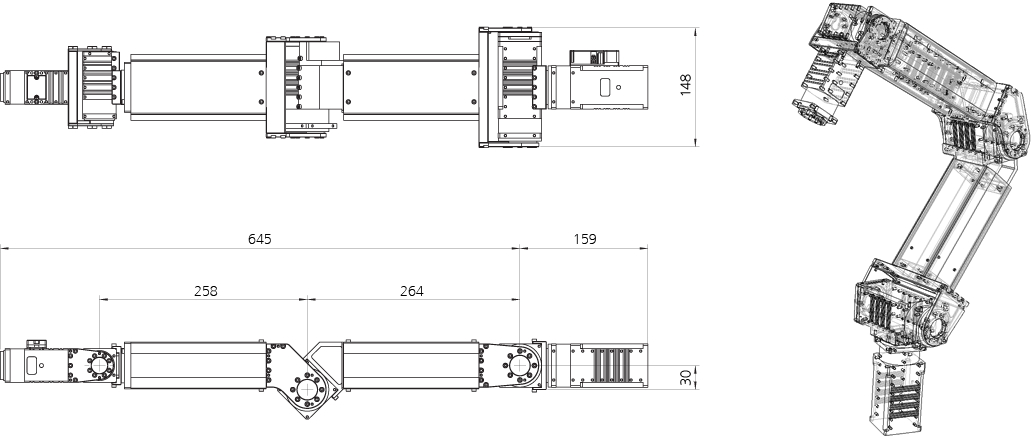
Dimension
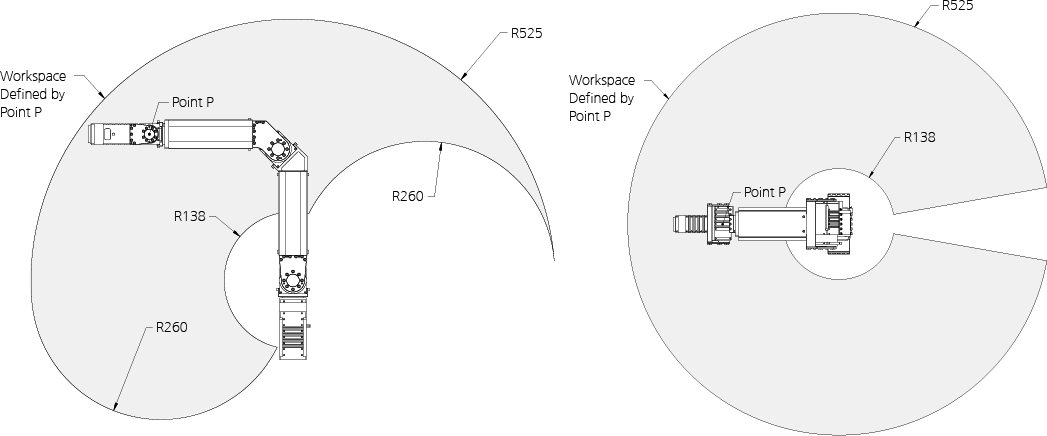
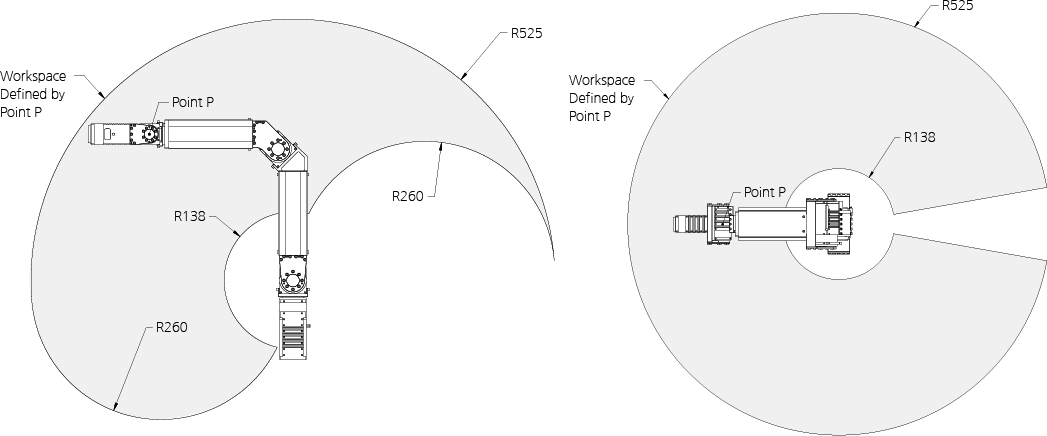
Workspace Reach and Footprint
Examples of Use
Development Environment

Ø e-Manual (http://emanual.robotis.com/docs/en/platform/openmanipulator_pro/overview/)
ü Overview
ü Specification
ü Getting Start
ü [ROS] Setup
ü [ROS] Manipulator Manager
ü [ROS] Operation
ü [ROS] Simulation
Ø SDK (https://github.com/ROBOTIS-GIT/open_manipulator)
ü ROS Package
|

905-0027-000 RM-P60-RNH
|