|
Introducing the OpenManipulator
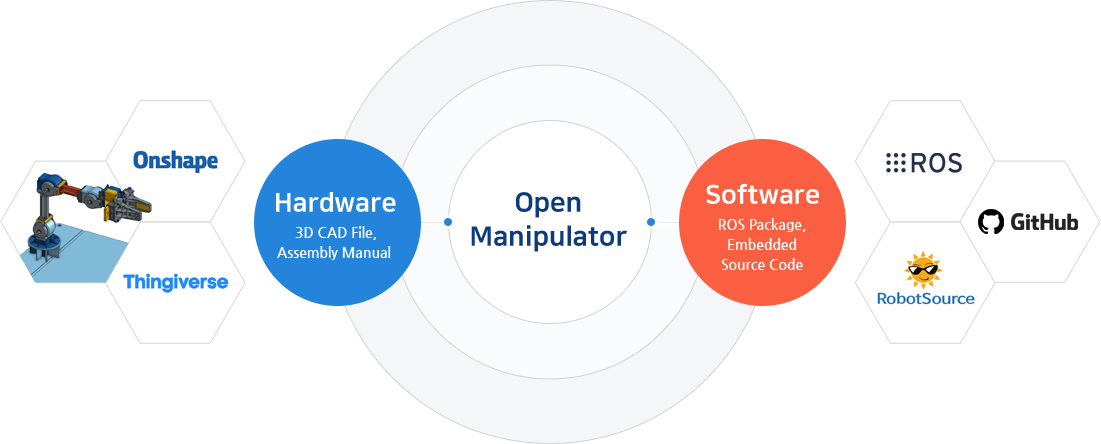
What is the " Open Manipulator�
Provide Open-Source CAD, Software, Hardware Design and Public Resources for Development.
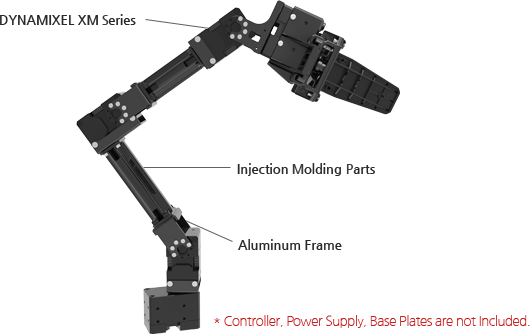
Specifications
Workspace
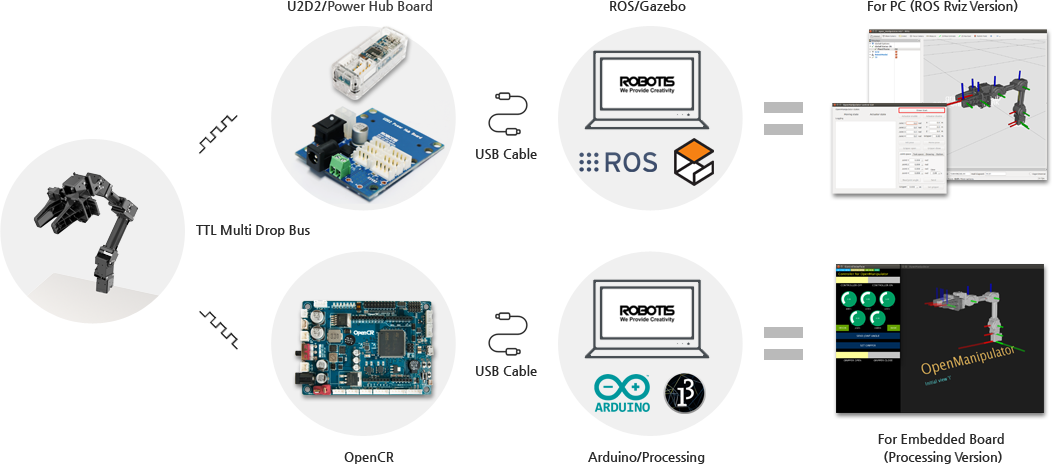
Development Environments
Alternate Configurations Possible
Various Applications
Recommended by IEEE SPECTRUM
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




905-0026-000 Base Plate-02
|







