PH54-200-S500-R

Feature
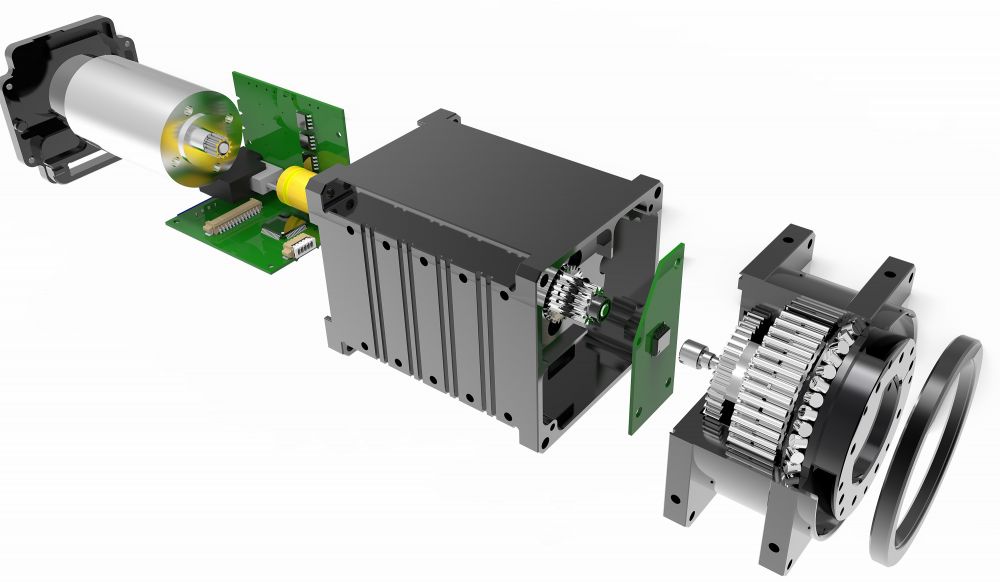
DYNAMIXEL is a robot exclusive smart actuator with fully integrated DC Motor + Reduction Gearhead + Controller + Driver + Network in one DC servo module.
DYNAMIXEL-P Series implements removable reduction cycloid gears, resulting in high precision and impact resistance.
- Torque control based on current sensing
- Position, Torque and Speed-based command
- High resolution with combination of Incremental Encoder and Contactless Absolute Encoder
- Full metal housing for high durability
- Can be used to make a full-size manipulator, pan tilt, humanoid, etc.
[DYNAMIXEL PRO -> P] Upgrade Details
- Improved design and JST connectors applied
- Improved dirt inflow and leakage
- Improved control table (Supports X Series functions)
- Enhanced control performance such as responsiveness and resolution
- Enhanced communication responsiveness
- Improved heat, noise, and durability
Package Component
|
PH54-200-S500-R
|
1
|
|
Robot Cable-X4P 300mm(Convertible)
|
1
|
|
Robot Cable-X4P 300mm
|
1
|
|
Power Cable-2P 600mm
|
1
|
|
Wrench Bolt WB M3x8
|
20
|
Compatible Products
Controller : OpenCM 485 Expansion Board, OpenCR1.0
Interface : USB2Dynamixel, U2D2
Factory Default Settings
ID : 1
Baud Rate : 57600bps
(User can change various settings including ID and baud rate according to environment)
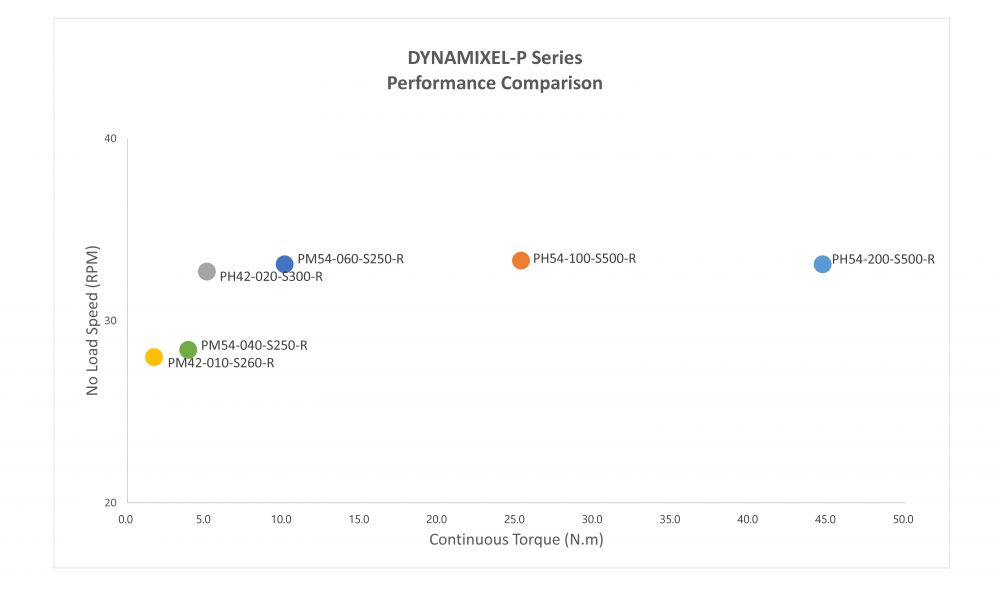
Performance Comparison
Caution
The operational voltage is different from other DYNAMIXEL series (Operational voltage: 24V).
Depending on the number of units used, it is recommended to use a separate power supply.
JST 4Pin connector is applied for communication.
The 54-series can NOT use the old hinge frames.
NOT COMPATIBLE with FRP54-H110/120/210/220)
Specification
|
Model Name
|
PH54-200-S500-R
|
|
MCU
|
Cortex-M4 (168 [Mhz], 32 [bit])
|
|
Input Voltage
|
Min. [V]
|
-
|
|
Recommended [V]
|
24.0
|
|
Max. [V]
|
-
|
|
Performance Characteristics
|
Voltage [V]
|
24.0
|
|
Stall Torque [N·m]
|
-
|
|
Stall Current [A]
|
-
|
|
No Load Speed [rpm]
|
33.1
|
|
No Load Current [A]
|
1.65
|
|
Continuous Operation *)
|
Voltage [V]
|
24.0
|
|
Torque [N·m]
|
44.7
|
|
Speed [rpm]
|
29.0
|
|
Current [A]
|
9.3
|
|
Resolution
|
Resolution [deg/pulse]
|
0.0004
|
|
Step [pulse]
|
1,003,846
|
|
Angle [degree]
|
360
|
|
Position Sensor
|
Contactless absolute encoder
Incremental encoder
|
|
Operating Temperature
|
Min. [°C]
|
-5
|
|
Max. [°C]
|
55
|
|
Motor
|
BLDC (Maxon)
|
|
Baud Rate
|
Min. [bps]
|
9,600
|
|
Max. [bps]
|
10,500,000
|
|
Control Algorithm
|
PID
|
|
Gear Type
|
Cycloid
|
|
Gear Material
|
Metal
|
|
Case Material
|
Metal
|
|
Dimensions (Wâ…¹Hâ…¹D) [mm]
|
54.0 X 126.0 X 54.0
|
|
Dimensions (Wâ…¹Hâ…¹D) [inch]
|
2.13 x 4.96 x 2.13
|
|
Weight [g]
|
855.00
|
|
Weight [oz]
|
30.16
|
|
Gear Ratio
|
501.9 : 1
|
|
Command Signal
|
Digital Packet
|
|
Protocol Type
|
Half duplex Asynchronous
Serial Communication (8bit, 1stop, No Parity)
|
|
Link (Physical)
|
RS485 Multi Drop Bus
|
|
ID
|
0 ~ 252
|
|
Feedback
|
Position, Velocity, Current, Temperature, Voltage, External Port, etc
|
|
Protocol version
|
Protocol 2.0
|
|
Operating Mode / Angle
|
Torque Control Mode
Velocity Control Mode
Position Control Mode
Extended Position Control Mode
PWM Control Mode
|
|
Output [W]
|
200
|
|
Standby Current [mA]
|
40
|
|
|
|
|
* ) These specifications are calculated based on the specifications of the core motor. Please consult ROBOTCLUB Malaysia for the long term use or special use, or else refer to the Performance Graph for general use.
Links
· ○ e-Manual
· ○ Drawing
· ○ Compatibility Guide
· ○ Selection Guide
· ○ DYNAMIXEL SDK