|
DYNAMIXEL X-Series is a new line-up  Basic Feature
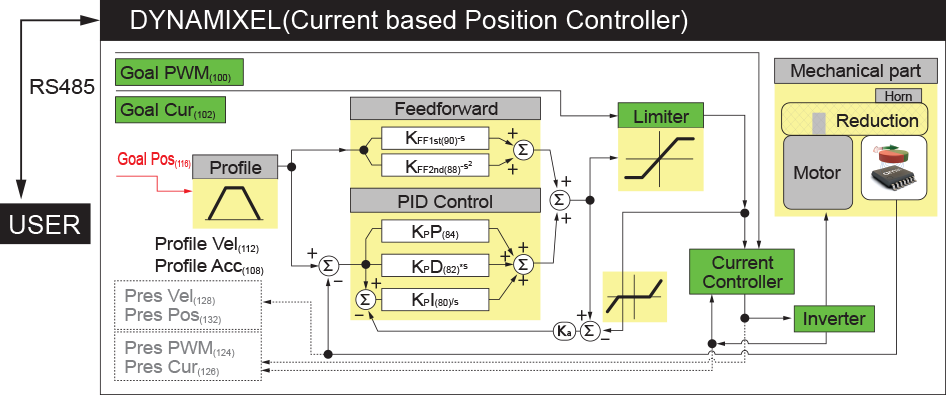
Various Control Functions
 Sophisticated Control Architecture
 New H/W Architecture â–ª Improved Torque, Compact Size 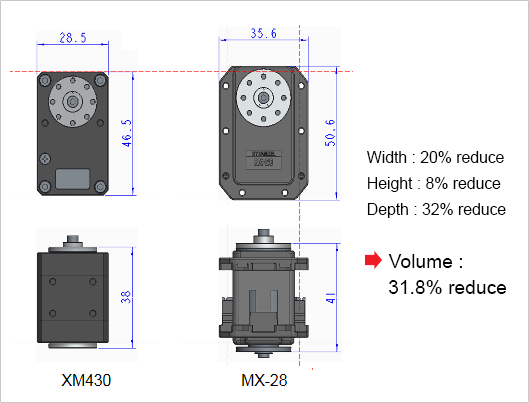 â–ª Compact Design â–ª Direct Screw Assembly to the Case (without Nut Insert) 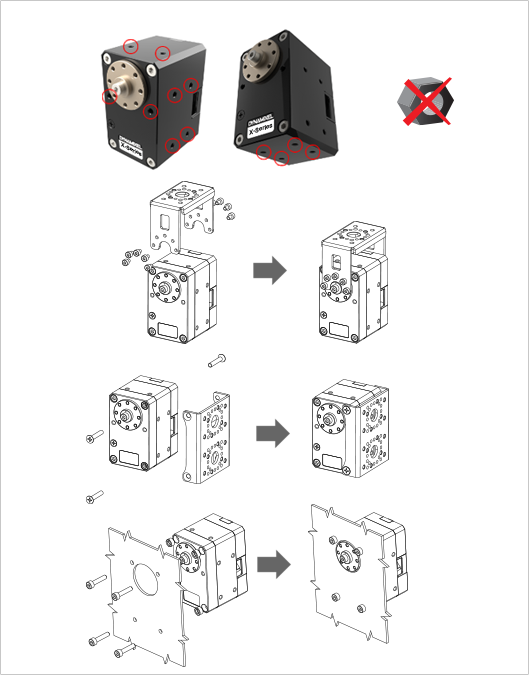 â–ª Aluminum Case: Improved Heat Sink Featuring & Enhanced Durability 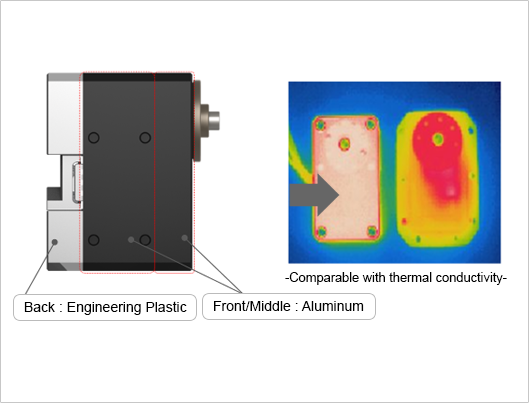 â–ª Hollow Back Case Minimizes Cable Stress â–ª Cable cover can Prevention Cable Seperation 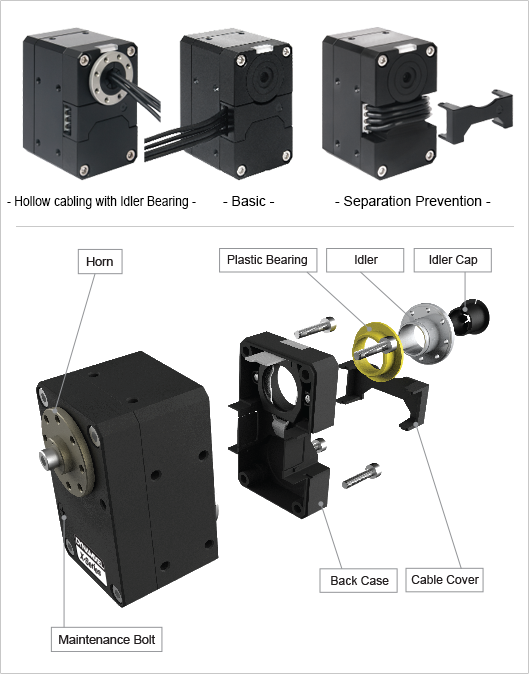 Development Environment
|

902-0130-000 XH430-V210-R
Compatible Products
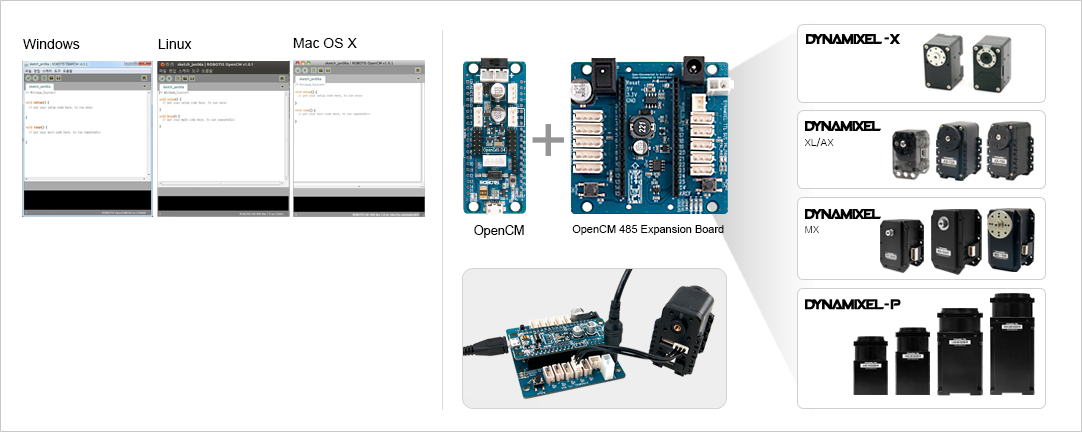
Controller : OpenCM9.04 485 Expansion Board, OpenCR1.0
Interface : USB2Dynamixel, U2D2
Factory Default Settings
ID : 1
Baud Rate : 57600bps
(User can change various settings including ID and baud rate according to environment)
Various Cabling Methods
Caution
1. DYNAMIXEL-X Series cable assembly through hollow case
2. Organize the entangled cable before assembling the back case.
3. Do not assemble the back case with entangled cable. The entangled cable can be squashed by the case and cause communication error.
4. If you use two cables through the hollow case, the cables will be damaged.
5. Use only one cable through the hollow case.
6. The DYNAMIXEL-X Series adopted a new gold-plated JST connector for secure and reliable communication.
7. The connector used for previous DYNAMIXEL is Molex.
8. To control DYNAMIXEL-X Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.
9. However, the Molex-JST convertible cable is NOT included in the XL430 model.
10. Please purchase a convertible cable when using a controller and interface that supports the JST connector.
Specification
Links
· ○ e-Manual
· ○ Drawing
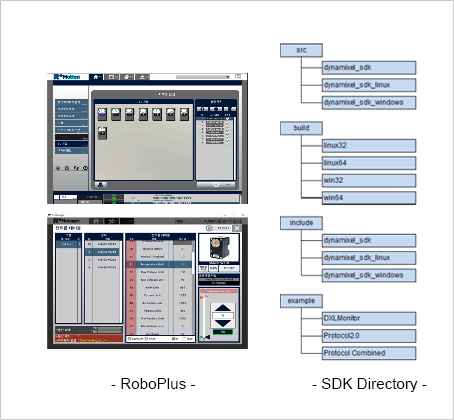
· ○ Software
· ○ Compatibility Guide
· ○ Selection Guide
· ○ DYNAMIXEL SDK
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||








